Research Areas
I am interested in both mechanisms (algorithms that do one thing well), as well as in architectures (systems that integrate mechanisms, to do many things well). Specifically, I am interested in mechanisms and architectures that concern artificial social intelligence, i.e., the social mind.
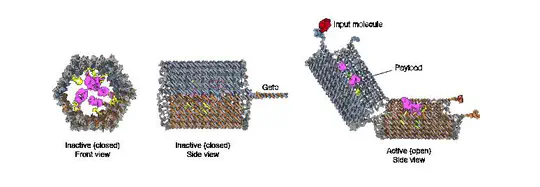
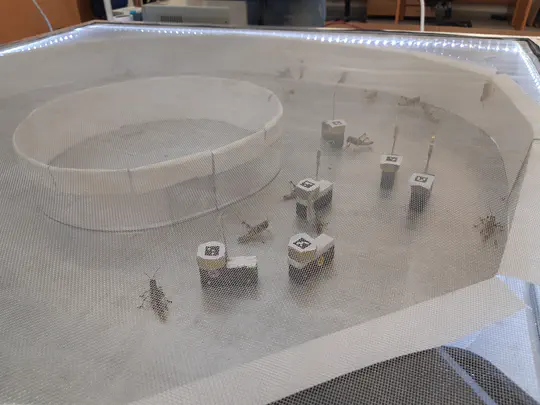
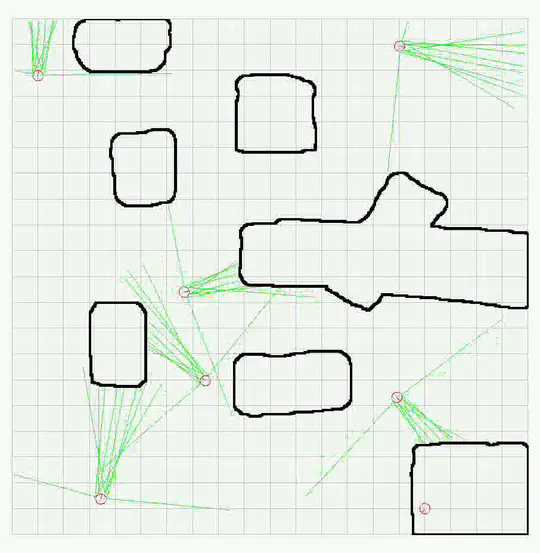
This translates into specific interests and research projects combining planning, execution, and learning in areas such as multi-robot coordination and teamwork, robot swarms (including molecular robots (nanobots)), plan recognition and goal recognition, and recently, LLM-based agents.
Sometimes, the research takes me further than anticipated. For example, work on learning in rational swarms have led to interest in multi-agent reinforcement learning; and advances in plan recognition has led to investigate models of human social cognition.
The main research projects are listed below. There’s a lot more that isn’t covered here, but can be found by browsing the publications, by topic.