Tolkien Project: Programming Molecular Robots (Nanobots)
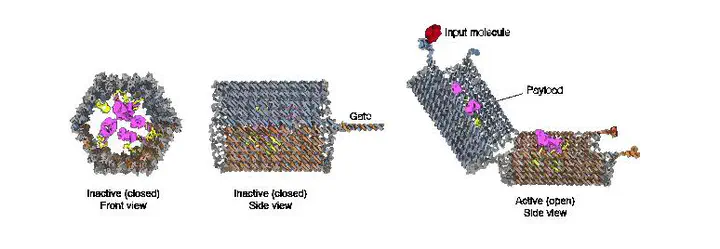 Illustration of DNA Origami Clamshell nanobots. Credit: Dr. Ido Bachelet
Illustration of DNA Origami Clamshell nanobots. Credit: Dr. Ido Bachelet
Over recent years, we have begun investigating the potential for bringing computer science tools into the design, programming, and deployment of molecular robots, measuring in the nano-meter scale. Nanobots (as we affectionately call them) have been in continuous development all over the world for a number of years. However, essentially all are being developed with a single medical task in mind. In contrast, we want to take advantage of computer science to create new treatments from combinations of existing and new nanorobots. Using compilation, optimization, simulation, information retrieval, and artificial intelligence, the development process can be accelerated immeasurably.
One immediate challenge is how to combine different medical nanobots (nano-particles, nano-devices) to achieve a desired clinical effect, personalized for the patient. We have introduced this is an AI planning problem:
- Alon, L., Weitman, H., Shleyfman, A. and Kaminka, G. A. Planning to be Healthy: Towards Personalized Medication Planning. In Proceedings of the European Conference on Artificial Intelligence (ECAI), 2024.
Two other challenges we have begun to tackle are (i) automating the safety of nanobots; and (ii) nanobot programming languages:
- G. A. Kaminka, R. Spokoini-Stern, Y. Amir, N. Agmon, and I. Bachelet. Molecular robots obeying Asimov’s three laws of robotics. Artificial Life, 23(3):343–350, 2017.
- I. Wiesel-Kapah, G. A. Kaminka, G. Hachmon, N. Agmon, and I. Bachelet. Rule-based programming of molecular robot swarms for biomedical applications. In Proceedings of the International Joint Conference on Artificial Intelligence, pages 3505–3512, 2016.