Mixed Robot-Animal Swarms
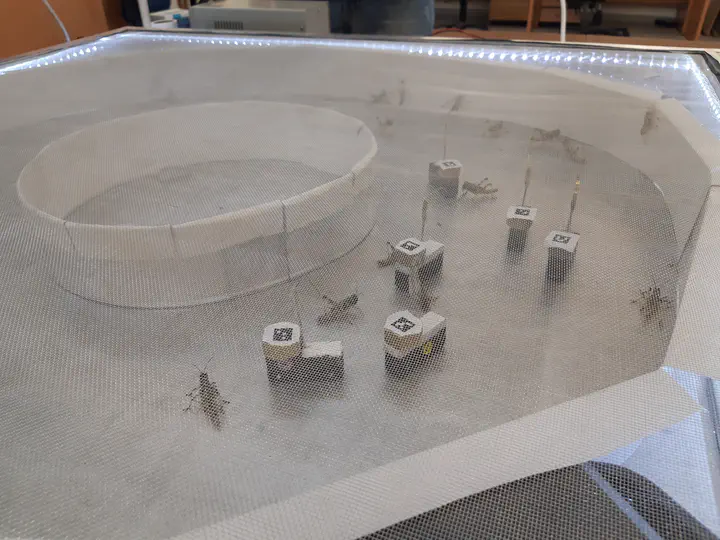 A small locust swarm, in Prof. Ayali’s lab.
A small locust swarm, in Prof. Ayali’s lab.
We are developing and using a unique research platform: Mixed robot- and live animal- swarms, in order to facilitate discovery of new results in biology and robotics. Specifically, we are developing robots that co-exist in lab experiments with locusts. The robot designs and software are open-source.
The current research thrusts are on rational swarms and vision-based collective motion, both described in the swarms research page. Relevant publications include:
-
Amir Ayali and Gal A. Kaminka. The hybrid bio-robotic swarm as a powerful tool for collective motion research: a perspective. Frontiers in Neurorobotics, 17:1215085, 2023.
-
David L. Krongauz, Amir Ayali, and Gal A. Kaminka. Vision-Based Collective Motion: A Locust-Inspired Reductionist Model. PLOS Computational Biology, 20(1):e1011796, 2024
-
Peleg Shefi, Amir Ayali, and Gal A. Kaminka. Bugs with Features: Vision-Based Fault-Tolerant Collective Motion Inspired by Nature. Autonomous Robots, 49(39), Springer Nature Switzerland, 2025.
-
Itay Bleichman, Peleg Shefi, Gal A. Kaminka, and Amir Ayali. The visual stimuli attributes instrumental for collective-motion-related decision-making in locusts. PNAS Nexus, 5(3):pgae537, Oxford University Press, 2024.